@павел-0 said:
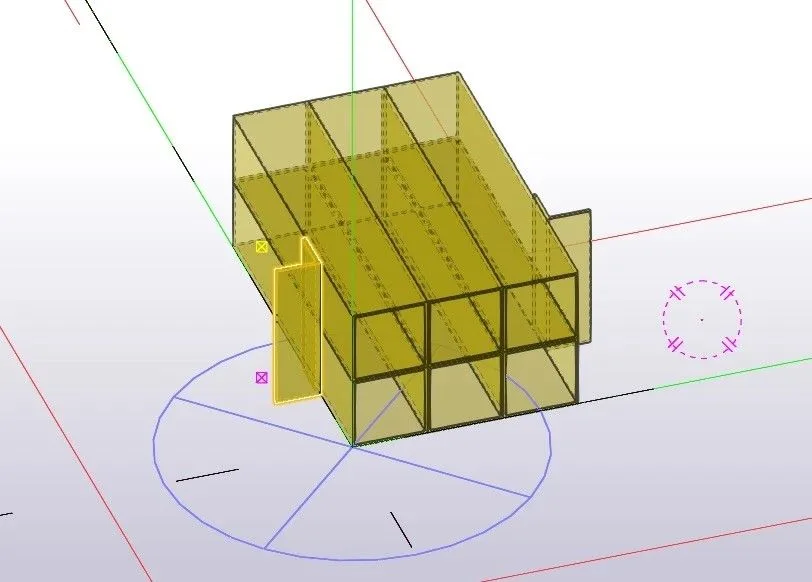
Нужно из детали 60x60x30 сделать деталь 50x50X20 какая программа фреза 20 скорость 6400
Добрый день!
давайте разбираться шаг за шагом
Важно! Сначала перед использованием применяйте тестовый режим!
Сначала задаем режимы, включаем шпиндель и подводим фрезу к началу координат.
G90 G17 G54 ; Абсолютная система координат, выбор плоскости XY, выбор системы координат[reference:6]
M03 S6400 ; Включить шпиндель на 6400 об/мин
G00 Z5.0 ; Быстро поднять фрезу на 5 мм над деталью
G00 X-10.0 Y-10.0 ; Быстро переместить фрезу в точку старта (за пределами заготовки)
Далее подрезаем верх- снимаем 10 мм по Z
#1 = 0.0 ; Начальная глубина (Z=0 — это верх заготовки)
#2 = -10.0 ; Конечная глубина (врезаемся в деталь на 10 мм)
#3 = -1.0 ; Шаг по глубине за один проход (1 мм)
WHILE [#1 GT #2] DO1 ; Цикл, который выполняется, пока мы не достигнем конечной глубины
#1 = #1 + #3 ; Увеличиваем глубину на шаг
IF [#1 LT #2] THEN #1 = #2 ; Если шаг слишком большой, фиксируем финальную глубину
G01 Z#1 F200 ; Врезаемся на новую глубину с рабочей подачей
G01 X70.0 F500 ; Фрезеруем по оси X до 70 мм (за край заготовки)
G00 Y10.0 ; Быстро поднимаем фрезу и переходим на следующую "дорожку"
G01 X-10.0 F500 ; Фрезеруем в обратную сторону
G00 Y20.0 ; Переходим на следующую дорожку
END1 ; Конец цикла
G00 Z5.0 ; Быстрый отвод фрезы вверх в конце цикла
Пояснение: Фреза будет двигаться змейкой, снимая слой за слоем. Этот код отлично подходит для начала.
Теперь углубляем центральную часть до 20 мм. Фактически, мы повторяем тот же принцип «змейки», но в ограниченной области.
#1 = 0.0 ; Текущая глубина (от верха)
#2 = -10.0 ; Глубина кармана (10 мм от верха)
#3 = -1.0 ; Шаг по глубине (1 мм)
WHILE [#1 GT #2] DO2 ; Запускаем цикл по глубине
#1 = #1 + #3
IF [#1 LT #2] THEN #1 = #2
G01 Z#1 F200 ; Врезаемся на новую глубину
G01 X0.0 F500 ; Начинаем фрезеровать от X=0 до X=50
G01 Y5.0 ; Смещаемся для следующего прохода (5 мм — это ~1/4 диаметра фрезы[reference:8])
G01 X50.0
G01 Y10.0
G01 X0.0
; ... и так далее, пока не обработаем всю площадь 50x50 мм ...
END2
G00 Z5.0
Пояснение: Этот цикл будет последовательно обрабатывать всю область кармана (50x50 мм) на заданную глубину.
M05 ; Остановить шпиндель
M30 ; Конец программы
И еще раз повторюсь! Важное примечание по безопасности: Всегда проверяйте новые программы в режиме сухого прогона (без заготовки) и убедитесь, что ваша станочная система (Fanuc, HAAS, Mach3 и т.д.) использует те же самые коды и синтаксис!