Огромный нефтяной резервуар высотой с десятиэтажный дом, внутри которого под огромным давлением находится тысячи тонн жидкости. Или гигантская ректификационная колонна на нефтеперерабатывающем заводе. Или барабан парового котла, вырабатывающего энергию для целого города.
Что общего у всех этих конструкций? Их основу составляют обечайки - незаметные, но критически важные элементы, без которых современная промышленность просто немыслима.

Откуда взялось слово «обечайка»? Этимология, уходящая впрошлое
Мало кто задумывается, но слово «обечайка» имеет древние корни, уходящие в глубь веков. Его происхождение - это настоящий лингвистический детектив.
Согласно этимологическому словарю Макса Фасмера, слово происходит от *обвитъчайка - то есть от корня «вить» (как вить веревку, плести) и приставки «об-» (вокруг).
Получается, что обечайка в буквальном смысле - это «то, что обвито вокруг» или «оплетка».
И действительно, в прошлом обечайками называли лыковые ободы на ситах, решетах и жерновах - те самые деревянные или плетеные кольца, которые «обвивали» сито по кругу, придавая ему форму и прочность. В украинском языке до сих пор существует слово «обичайка» с тем же значением.
А вы знали, что обечайка - это еще и боковая часть корпуса музыкальных инструментов? Да, та самая изогнутая стенка гитары, скрипки или виолончели, которая соединяет верхнюю и нижнюю деки, тоже называется обечайкой. И у барабанов обечайка есть - ее называют «кадло».
Таким образом, слово «обечайка» объединяет в себе сотни лет истории: от плетеного обода крестьянского решета до высокотехнологичной детали космического корабля или корпуса атомного реактора. И во всех случаях смысл остается неизменным - это кольцевой элемент, который «обвивает» конструкцию, придавая ей форму, прочность и целостность.
Что такое обечайка в современном понимании?
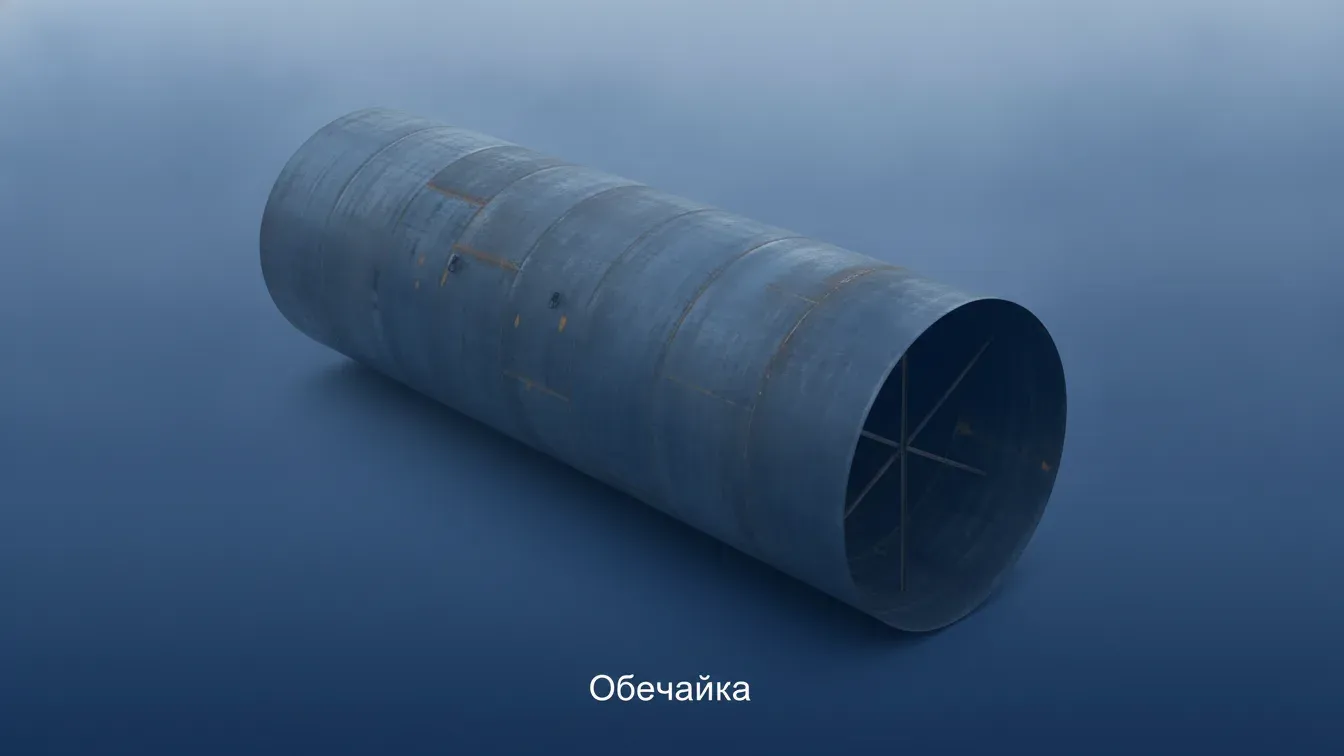
В современной промышленности обечайка - это открытый с торцов цилиндрический или конический элемент, изготовленный из листового металла путем вальцовки (гибки) и последующей сварки.
Если говорить максимально просто: обечайка - это свернутый в кольцо лист металла. Как лист бумаги, который вы свернули в трубочку и склеили края. Только вместо бумаги - сталь толщиной от нескольких миллиметров до десятков сантиметров, а вместо клея - сварной шов высочайшего качества.
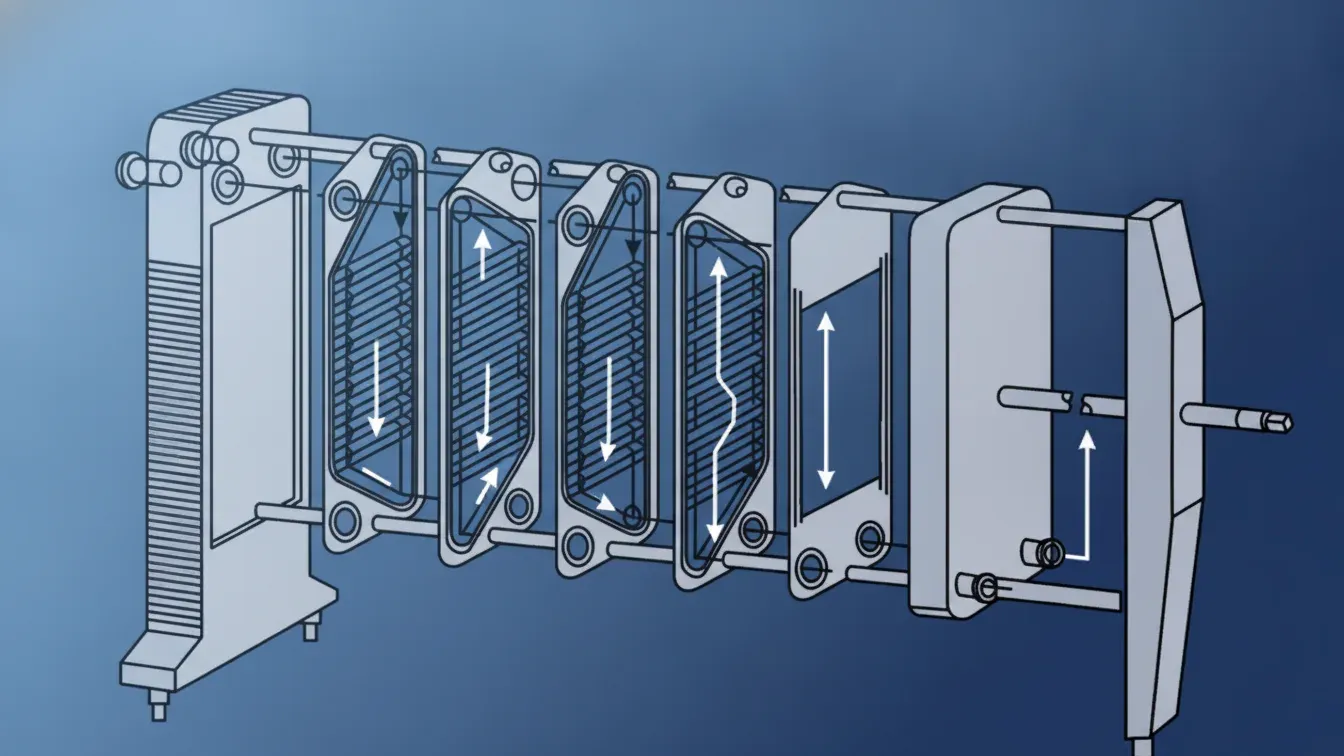
Эти, казалось бы, простые кольца являются основой для огромного количества оборудования. Именно из обечаек, собранных встык и сваренных между собой, собираются стенки резервуаров, корпуса реакторов, кожухи теплообменников и секции трубопроводов.

Технология изготовления: как рождается обечайка
Производство обечайки - это сложный высокотехнологичный процесс, состоящий из нескольких ключевых этапов. Каждый из них требует высокой точности, современного оборудования и квалифицированных специалистов.
Основные этапы производства:
| Этап |
Описание |
Важность |
| 1. Раскрой листа |
Листовой металл нарезается на заготовки точных размеров с использованием плазменной, газовой или лазерной резки |
Обеспечивает точные геометрические параметры будущей обечайки |
| 2. Подготовка кромок |
Края заготовки обрабатываются под сварку |
Критически важно для качества сварного шва |
| 3. Вальцовка (гибка) |
Заготовка пропускается через трех- или четырехвалковые станки, где под давлением валков приобретает цилиндрическую или коническую форму |
Самый ответственный этап — от него зависит геометрия изделия |
| 4. Сварка |
Кромки свернутого листа свариваются продольным швом. При сборке нескольких поясов выполняются и кольцевые швы |
Обеспечивает герметичность и прочность конструкции |
| 5. Калибровка |
Готовое изделие проходит калибровку для устранения овальности и достижения точных размеров |
Гарантирует соответствие заданному диаметру |
| 6. Контроль качества |
Проверка геометрии, сварных швов (визуально, измерительно, методами неразрушающего контроля) |
Обеспечивает безопасность и надежность |
Заказать изготовление обечаек в нашей компании — значит получить изделие, прошедшее все этапы контроля качества в соответствии с требованиями ГОСТ и отраслевых стандартов.
Холодная и горячая вальцовка
Важный нюанс технологии: при толщине листа до 40 мм применяется холодная вальцовка. Для толстостенных изделий используются мощные станки, иногда с предварительным подогревом заготовок («горячая» вальцовка). Это позволяет работать с металлом большой толщины, сохраняя качество гибки и предотвращая появление трещин.
Виды обечаек: форма определяет функцию
Обечайки классифицируются по нескольким признакам. Выбор типа обечайки напрямую зависит от ее назначения и условий эксплуатации.
По геометрической форме:
| Тип |
Описание |
Основное применение |
| Цилиндрические |
Прямые кольцевые элементы с постоянным диаметром по всей длине |
Стенки резервуаров, емкостей, трубные вставки, кожухи аппаратов |
| Конические |
Элементы с переменным диаметром, сужающиеся или расширяющиеся |
Переходные элементы между разными диаметрами, воронки, бункеры, разгрузочные узлы |
| Секционные |
Собираются из нескольких сегментов-лепестков |
Особо крупные диаметры (свыше 3 метров) и нестандартные конструкции |


Каждый тип имеет свои особенности в расчете и технологии изготовления. Для цилиндрических обечаек критически важны устойчивость к внутреннему давлению и минимальные отклонения по овальности. Для конических - точность угла и качество стыковки с соседними элементами.
По конструкции:
- Однослойные - классический вариант, наиболее распространенный.
- Многослойные (с рубашкой) - две обечайки разного диаметра, вложенные друг в друга. Используются в сосудах под давлением для обогрева или охлаждения.
- Сварные из лепестков - собираются из нескольких секторов при очень больших диаметрах.
Материалы: от углеродистой стали до специальных сплавов
Выбор материала для обечайки - это вопрос безопасности и долговечности всего оборудования. Неправильно подобранная марка стали может привести к катастрофическим последствиям: от утечек и аварий до полного разрушения конструкции.
Основные материалы для изготовления обечаек:
| Материал |
Марки |
Характеристики |
Область применения |
| Углеродистая сталь |
Ст3, сталь 20 |
Универсальная, доступная, хорошая свариваемость |
Резервуары и конструкции общего назначения |
| Низколегированная сталь |
09Г2С, 17Г1С |
Повышенная прочность, устойчивость к низким температурам |
Повышенные нагрузки, северные условия |
| Нержавеющая сталь |
12Х18Н10Т, AISI 304/316 |
Коррозионная стойкость, санитарная безопасность |
Пищевая, химическая, фармацевтическая промышленность, агрессивные среды |
| Цветные сплавы |
Алюминиевые, медные сплавы |
Легкость, специальные свойства |
Специальные аппараты и легкие конструкции |
Особое внимание уделяется соответствию материала и толщины требованиям ГОСТ и профильных стандартов, особенно при работе с аппаратами под давлением.
Мы изготавливаем обечайки на заказ из любых марок стали, включая специальные - по индивидуальным требованиям проекта. Подробнее.
Где применяются обечайки? Практически везде!
Обечайки - это универсальный строительный блок современной промышленности. Их применение охватывает десятки отраслей.
Отрасли применения:
- Нефтегазовая промышленность - корпуса сепараторов, абсорберов, ректификационных колонн, резервуары для хранения нефтепродуктов и газов
- Химическая промышленность - реакторы, колонны, теплообменники, емкости для агрессивных сред
- Энергетика - барабаны паровых котлов, корпуса турбин, конденсаторы
- Пищевая промышленность - бродильные чаны, пастеризаторы, емкости для хранения продуктов
- Строительство - опоры мостов, колонны, дымовые и вентиляционные трубы
- Водоподготовка и ЖКХ - напорные резервуары для воды, отстойники
Конкретные конструкции:
- Резервуары и емкости для хранения воды, нефтепродуктов, химических сред
- Корпуса технологических аппаратов, колонн и кожухов теплообменников
- Секции трубопроводов, переходы, вставки и защитные оболочки
- Элементы дымовых труб, газоходов и воздуховодов
- Части цилиндрических и конических металлоконструкций в строительстве

Стандарты и требования к качеству
Производство обечаек строго регламентируется государственными стандартами. Это не просто формальность - это вопрос безопасности жизни и здоровья людей.
Основные нормативные документы:
- ГОСТ 25215-82 - «Сосуды и аппараты высокого давления. Обечайки и днища. Нормы и методы расчета на прочность»
- ГОСТ Р 52857.2-2007 - «Сосуды и аппараты. Нормы и методы расчета на прочность»
- ГОСТ Р 52630-2012 - общие требования к сосудам и аппаратам
Ключевые параметры контроля:
- Геометрия: диаметр, овальность, прямолинейность кромок, длина
- Сварные швы: визуальный, измерительный контроль и неразрушающие методы (ультразвук, радиография)
- Калибровка: точное соответствие рабочим размерам
- Документация: протоколы контроля, паспорта, сертификаты материалов
Для сосудов и резервуаров под давлением дополнительно выполняются расчеты по прочности, испытания и расширенный контроль швов.
Что влияет на стоимость изготовления обечаек?
Понимание факторов ценообразования поможет вам оптимизировать бюджет при заказе.
Основные факторы:
| Фактор |
Влияние на стоимость |
| Марка стали и толщина листа |
Чем толще и качественнее металл - тем выше стоимость |
| Диаметр, длина и тип обечайки |
Конические и секционные сложнее в изготовлении |
| Требования к контролю швов |
Расширенный контроль (ультразвук, рентген) увеличивает затраты |
| Дополнительная обработка |
Обработка торцов, защитные покрытия, антикоррозионная защита |
| Объем партии |
Серийные заказы снижают стоимость за счет оптимизации |
Корректно составленное техническое задание помогает быстро получить точный расчет и оптимизировать бюджет. А также мы создали калькулятор обечаек для упрощения расчета стоимости.
Как заказать изготовление обечаек в нашей компании?
Мы предлагаем полный цикл производства обечаек - от разработки чертежей до отгрузки готовых изделий.
Процесс заказа:
- Подготовьте чертежи или техническое задание с указанием диаметра, длины, толщины стенки, марки стали и требований к контролю
- Передайте данные для расчета стоимости и выбора оптимальной технологии
- Согласуйте коммерческое предложение, сроки и условия выполнения заказа
- Запустите заказ в производство - при необходимости организуйте контроль ключевых этапов
- Получите готовые обечайки и используйте их в составе резервуаров, емкостей и металлоконструкций
 Совет: чем полнее исходная информация, тем быстрее мы сможем подобрать технологию, рассчитать стоимость и согласовать сроки. При необходимости наши специалисты предложат рекомендации по оптимизации толщины, конструкции и схемы раскроя.
Совет: чем полнее исходная информация, тем быстрее мы сможем подобрать технологию, рассчитать стоимость и согласовать сроки. При необходимости наши специалисты предложат рекомендации по оптимизации толщины, конструкции и схемы раскроя.
Преимущества обечаек из листового металла
Почему обечайки из листового металла стали стандартом в промышленности?
| Преимущество |
Пояснение |
| Высокая прочность |
Способность выдерживать огромное внутреннее и наружное давление |
| Герметичность |
Качественный сварной шов обеспечивает полную герметичность |
| Долговечность |
При правильной антикоррозионной обработке - десятилетия службы |
| Универсальность |
Возможность изготовления практически любого диаметра и конфигурации |
| Экономичность |
Производство из листового металла дешевле литья или ковки |
| Адаптивность |
Индивидуальное изготовление по чертежам заказчика |
Подводим итоге
Обечайка - это не просто кусок свернутого металла. Это - результат тысячелетней эволюции: от плетеного обода крестьянского решета до высокотехнологичного элемента современных нефтяных вышек, химических реакторов и космических кораблей.
Слово, пришедшее к нам из глубины веков от корня «вить» - «обвивать вокруг», - сегодня обозначает основу современной промышленности. Без обечаек не было бы ни огромных резервуаров для хранения нефти, ни сложных химических производств, ни надежных трубопроводов, по которым текут энергоносители по всей планете.
Нужны качественные обечайки? Закажите их у нас! info@investsteel.ru
Наши специалисты помогут подобрать оптимальный материал, рассчитать стоимость и изготовить изделия, которые прослужат десятилетия. Свяжитесь с нами - и мы сделаем надежную основу для вашего оборудования.
https://investsteel.ru/category/obechaiki




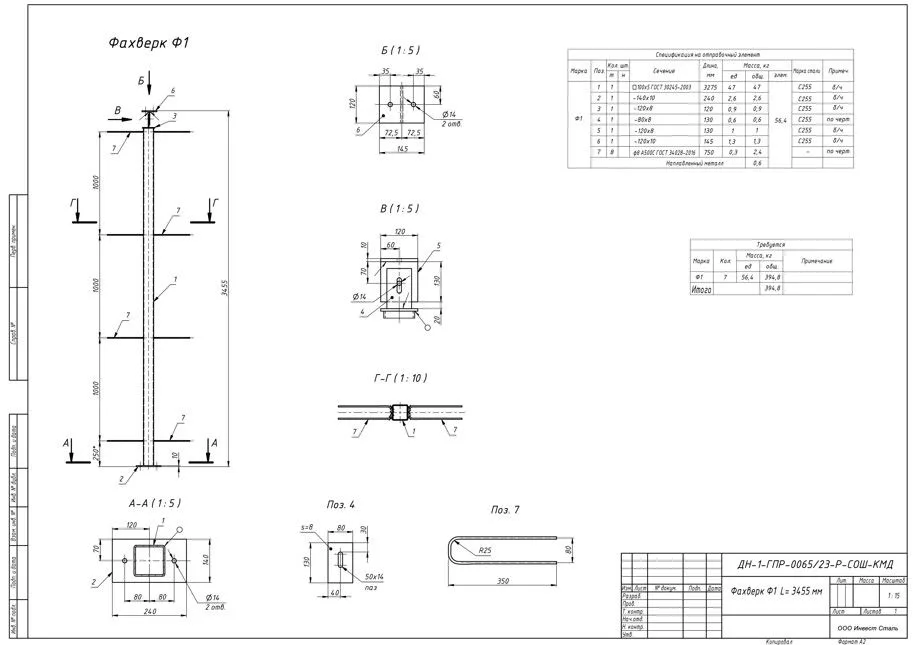
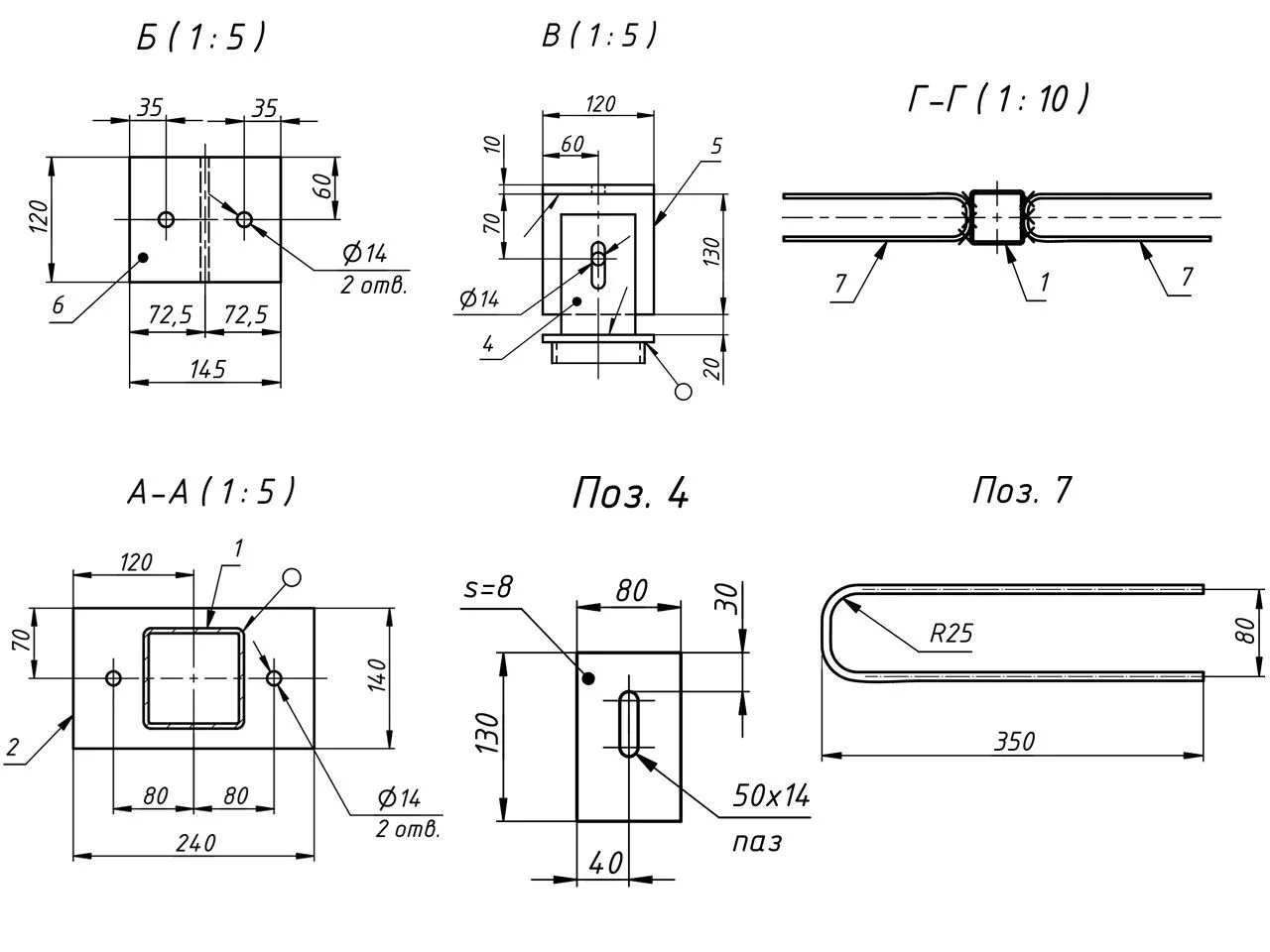
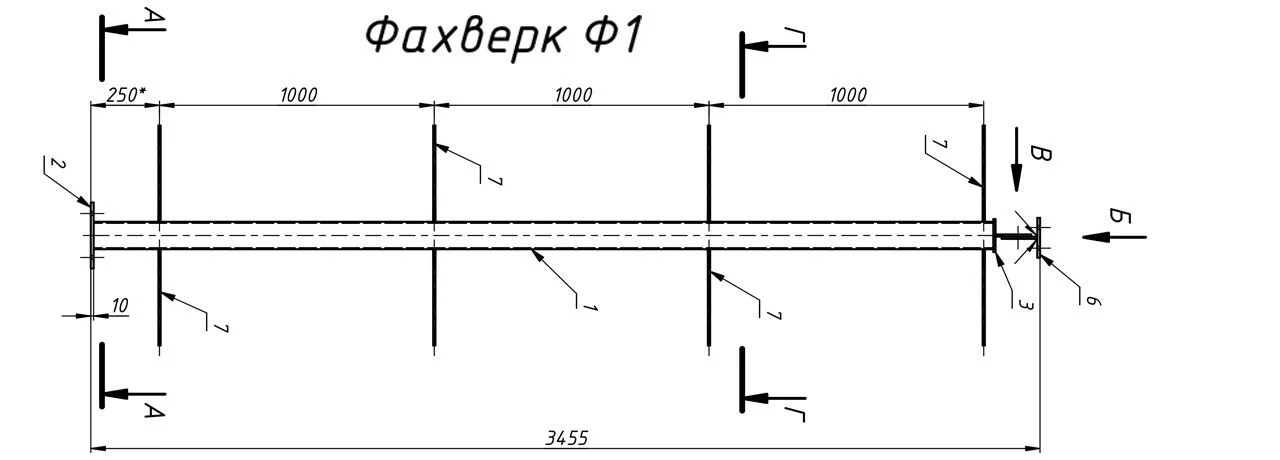
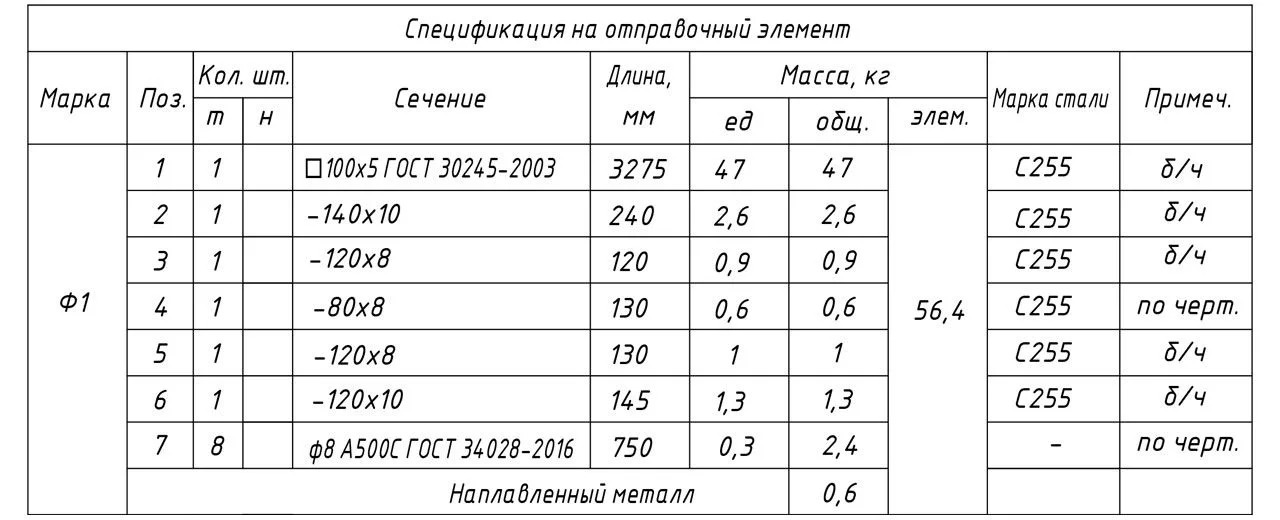
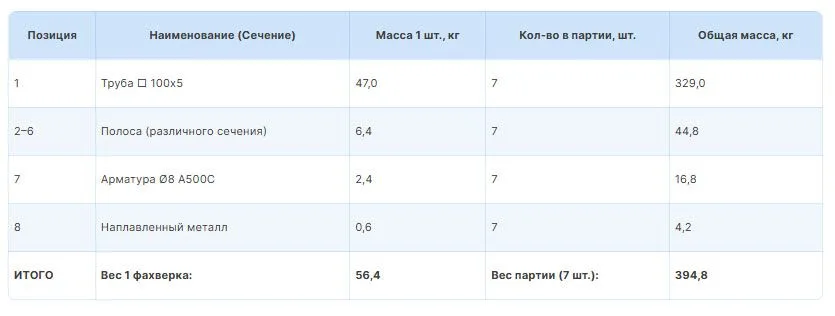

 ️ Важнейшее правило: никогда не смотрите только на общий вес! Обязательно изучайте узлы и разрезы (в нашем случае - А-А, Б-Б, В, Г-Г). Именно там прячутся мелкие детали, пазы и фаски — они требуют дополнительного времени резчиков, а значит, напрямую влияют на стоимость работ.
️ Важнейшее правило: никогда не смотрите только на общий вес! Обязательно изучайте узлы и разрезы (в нашем случае - А-А, Б-Б, В, Г-Г). Именно там прячутся мелкие детали, пазы и фаски — они требуют дополнительного времени резчиков, а значит, напрямую влияют на стоимость работ. Итого материал на 1 шт: 3 698,6 ₽
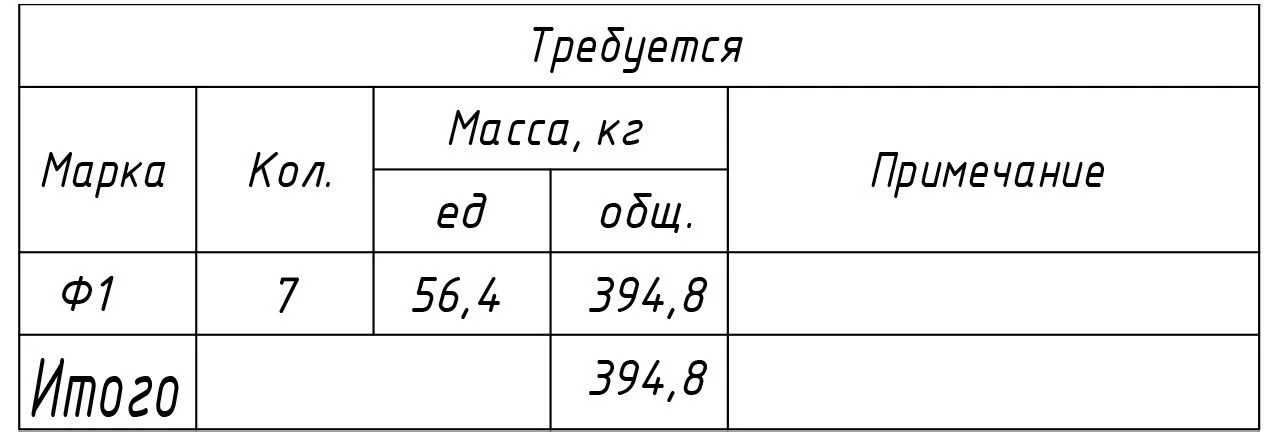
Итого материал на 1 шт: 3 698,6 ₽ Это «чистый» вес без учёта неликвидов и обрезков. На практике обычно закладывают ещё 1–7% сверху - не забывайте про это!
Это «чистый» вес без учёта неликвидов и обрезков. На практике обычно закладывают ещё 1–7% сверху - не забывайте про это!")